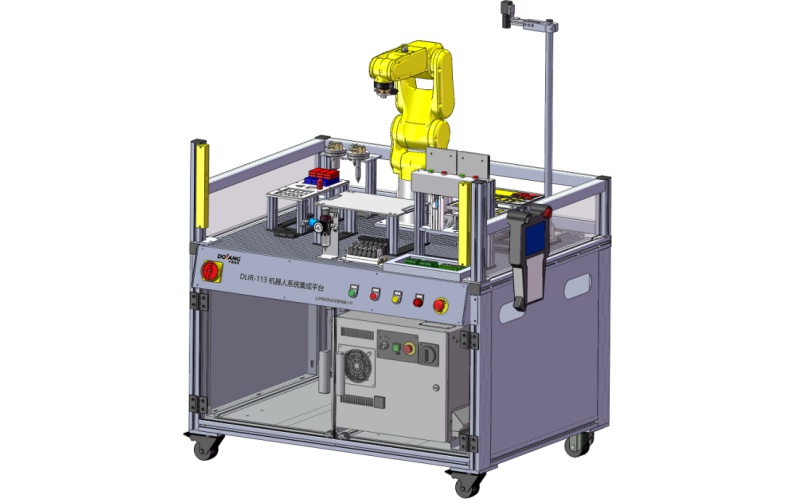
DLDS-1190 Industrial robot system integration platform ng pagsasanay

- Dolang
- Tsina
- 40-60 araw
Maaaring sanayin ng industrial robotics training platform ang mga mag-aaral na makabisado ang robotics operation, debugging, visual application ng mga industrial robots, PLC principle, PLC programming, sensor technology, PROFINET Industrial Ethernet communication technology, atbp.
Ang industrial robot teaching platfrom ay maaaring gamitin upang maisakatuparan ang mga pang-industriya na robot machining automation na mga gawain, intelligent na paglilipat, pag-uuri at pagsasalansan ng mga gawain ng mga robot na pang-industriya, pang-industriya na robot na gawain sa packaging ng regalo, welding na gawain ng pang-industriya na aplikasyon ng proseso ng robot, gawain sa pagpupulong ng pang-industriya na robot na digital na keyboard, pag-disassembly ng robot pagsasanay ng robot simulation software
1.pangkahalatang ideya
Ang DLDS-1190 Industrial robot system integration training platform ay pangunahing binubuo ng FANUC er-4ia industrial robot, Siemens s7-1500 cpu1516-3 pn/dp PLC, FANUC industrial intelligent camera vision system (2D), basic operation assessment module, machining automation task unit, intelligent transfer sorting stacking task unit, gift packaging task unit, process application welding task unit, digital keyboard assembly task unit, atbp. Ang industriyal na robotics teaching platform ay maaaring sanayin ang mga mag-aaral na makabisado ang pang-industriyang robot na operasyon, pag-debug, visual na aplikasyon ng mga pang-industriyang robot , Prinsipyo ng PLC, programming ng PLC, teknolohiya ng sensor, teknolohiya ng komunikasyon ng PROFINET Industrial Ethernet, atbp.
2. Mga teknikal na parameter
2.1 temperatura: +5 hanggang +45 °; Ambient humidity: ≤ 85% (25 ℃).
2.2 system floor area: mahaba × lapad × Taas ≈ 4m × 3m × 2.5mm (maaaring iakma ang lapad ayon sa mga kondisyon ng site)
3.3 pangkalahatang kapangyarihan: mga 3.5kva.
3.4 altitude: ≤ 4000m.
3.5 input power supply: AC220V ± 10%.
Output power supply: DC24V.
3.6 kapaligiran: vibration ≤ 0.5g, walang alikabok, kinakaing unti-unti na gas, nasusunog na gas, ambon ng langis, singaw ng tubig, tumutulo na tubig o asin, atbp.
3.7 maaasahang saligan ng system: grounding impedance < 4 ohms.
3.8 compressed gas pressure: 0.3-0.7mpa.
3.9 cooling mode: natural na paglamig.
3. Mga proyekto sa pagsasanay
1) Pag-install ng mga robot na pang-industriya
2) Pag-install ng kagamitan sa pagtuturo para sa pang-industriyang robot
3) Pag-install ng mga end tool para sa mga robot na pang-industriya
4) Setting ng parameter ng robot na pang-industriya
5) Praktikal na pagsasanay sa mode ng operasyon at manu-manong bilis ng pang-industriyang robot
6) Pagtingin sa karaniwang impormasyon ng mga robot na pang-industriya
7) Panimula sa mga tagubilin sa programming para sa mga robot na pang-industriya
8) Pag-backup at pagbawi ng programang pang-industriya na robot
9) Initial power on at IO configuration ng industrial robot
10) Praktikal na pagsasanay ng pang-industriya na robot coordinate system calibration
11) Pagtatakda ng ligtas na lugar ng pagtatrabaho para sa mga robot na pang-industriya
12) Fault diagnosis at pagpapanatili ng pang-industriyang robot
13) Praktikal na pagsasanay sa pagbabasa ng mga de-koryenteng guhit
14) Pneumatic circuit connecting pipe at electrical wiring
15) Application ng detection switch
16) Application ng maramihang mga sensor
17) Paglalapat ng mga bahagi ng pneumatic
18) Pag-install at aplikasyon ng PLC
19) Pag-install at aplikasyon ng touch screen
20) Komunikasyon sa pagitan ng robot at PLC
21) komunikasyon sa pagitan ng touch screen at PLC
22) praktikal na pagsasanay ng pang-industriyang robot at visual na komunikasyon
23) aplikasyon ng pang-industriyang robot na mabilis na pagbabago na tool
24) plane trajectory task ng pang-industriyang robot
25) pang-industriya na robot space trajectory na gawain
26) curved surface trajectory task ng pang-industriyang robot
27) paghawak at pagsasalansan ng mga parisukat at bilog na bloke ng mga robot na pang-industriya
28) paghawak at pag-stack ng gawain ng mga espesyal na hugis na tool (Tangram) ng mga robot na pang-industriya
29) pang-industriya na robot machining automation na mga gawain
30) matalinong paglilipat, pag-uuri at pagsasalansan ng mga gawain ng mga robot na pang-industriya
31) gawaing packaging ng regalo ng robot na pang-industriya
32) welding task ng industrial robot process application
33) gawain ng pagpupulong ng pang-industriyang robot na digital na keyboard
34) robot disassembly pagsasanay ng robot simulation software